
GPS/GNSS for Robotic and Autonomous Devices
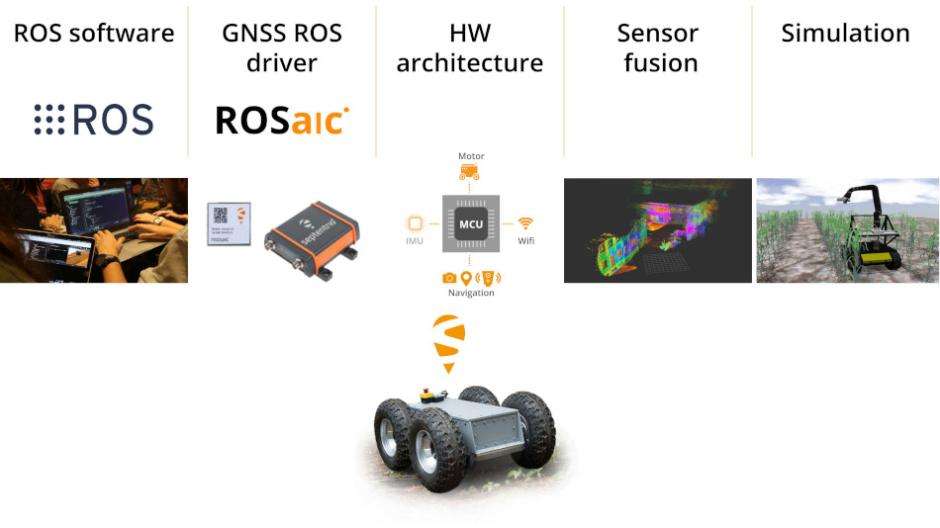
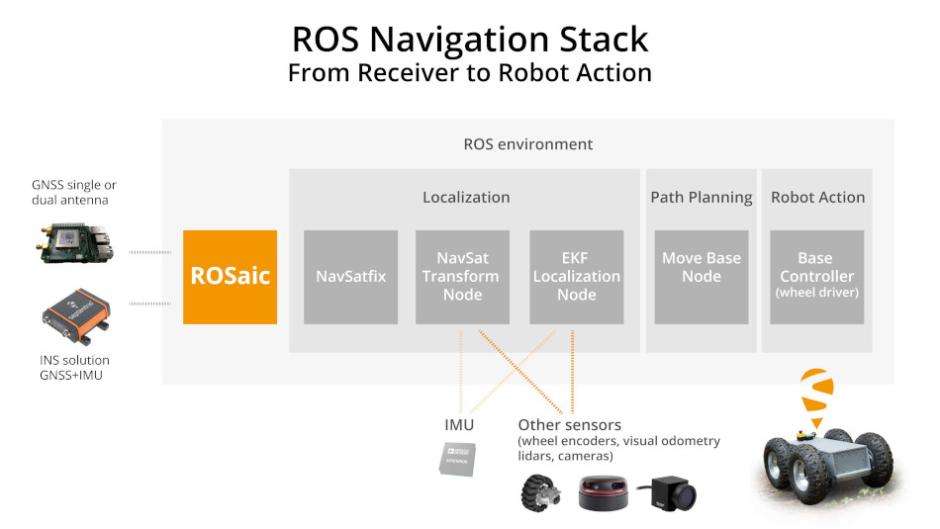
Within the navigation stack the open-source ROSaic driver can be used for plug-and-play GNSS configuration and positioning. The ROSaic is a C++ driver for ROS1 (Melodic and Noetic) and ROS2 (Foxy, Galactic, Rolling and Humble), enabling quick integration of any Septentrio GPS/GNSS receiver for reliable high accuracy positioning and/or orientation for your robot.
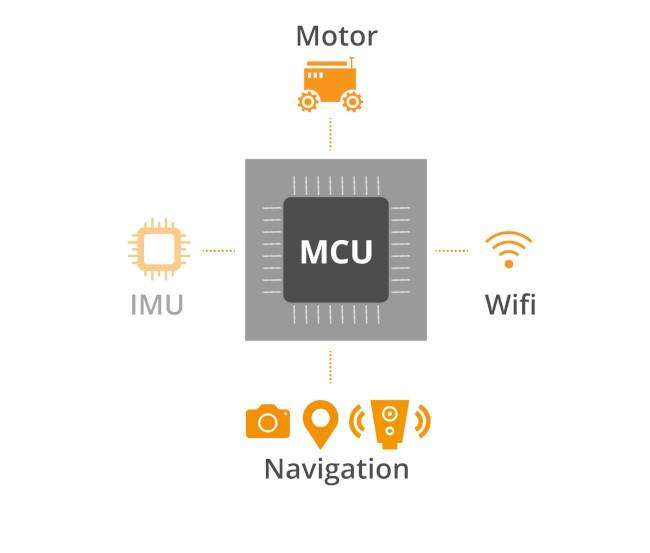
HW Architecture: Choosing the most suitable components
Centralizing your system around a Raspberry Pi or an Arduino single board computer is one of the easiest ways to get started with your prototype. For professional development NVDIA or STM32 are suitable platforms. For systems where fine movements matter, a GPS/GNSS receiver with RTK centimeter-level positioning can be integrated alongside other sensors such as cameras or LiDAR. Accurate positioning is especially important when the robot is navigating around sensitive objects or in a robot fleet. Septentrio GNSS receivers are not only accurate but also robust in challenging environments with built-in AIM+ technology offering unmatched resilience to GNSS/ GPS interference, which often occurs in systems where many electronic devices are located in close proximity to each other. On our Community page you will find open-source resources for easy integration of Septentrio receivers such as mosaicHAT Raspberri Pi addon, Mowi wireless and more.
Sensor Fusion: GNSS and other sensors
Sensors such as lidars, cameras or radars can be integrated within the Navigation stack of ROS. Adding a GNSS receiver places the system on absolute global coordinates with decimeter or even cm-level accuracy. Combining GNSS and an IMU is also sensor fusion which can take place either within the navigation stack or directly on a single board GNSS/INS system. Septentrio off-the-shelf GNSS/INS receiver brings superior positioning and orientation performance and simplifies integration with a single input to the ROS navigation stack.

Simulation: development time saver
By running simulations early in the development process, you can save time on HW/SW iterations by fine-tuning your design up-front, testing out code and seeing how your robot would act in special conditions such as during sensor failure. Just pass logged GNSS data to ROSaic to test out your ROS navigation stack code. Then validate your robot behavior with ROS visualization and analysis libraries coupled with simulation software such as Gazebo. In addition, Amazon’s AWS RoboMaker offers a collection of simulation tools on the cloud.
Other tools to speed up robotic development
For prototyping, the mosaicHAT open-source board can be used to easily link the mosaic GNSS module to Raspberry Pi or even Arduino. This compact GNSS board with all basic communication interfaces (USB, serial port, events, PPS, FTDI) has an openly available reference design and footprint. Mowi is an open-source reference design for Septentrio’s highly accurate GNSS mosaic module with Wi-Fi and Bluetooth communication, which can be programmed for custom applications adding a big value to connected robotics. See our Community page for more information on mosaicHAT, mowi and other open-source projects for GNSS integration.
UAV s and drones are also robots and are in some cases based on ROS. However, many other aerial systems use ArduPilot or PX4 Autopilot for flight control. Septentrio receivers also integrate easily with these SW packages, providing reliable positioning for safe drone navigation or mapping. For PX4 Autopilot there is a dedicated driver for Septentrio mosaic GNSS module and AsteRx-m3 board, for both single or dual antenna heading configuration.
Learn More
- Free WEBINARS on demand
- GitHub
- repository for ROSaic - ROS driver for mosaic and other receivers
- repository for MosaicHAT - addon for Raspberry Pi or Aduino hardware
- repository for Mowi - Wireless communication hardware for mosaic
- Repository for PX4 – driver for integration of mosaic or AsteRx-m3 into PX4 Autopilots