
适用于机器人和自主装置的 GPS/GNSS
硬件架构:选择最合适的组件
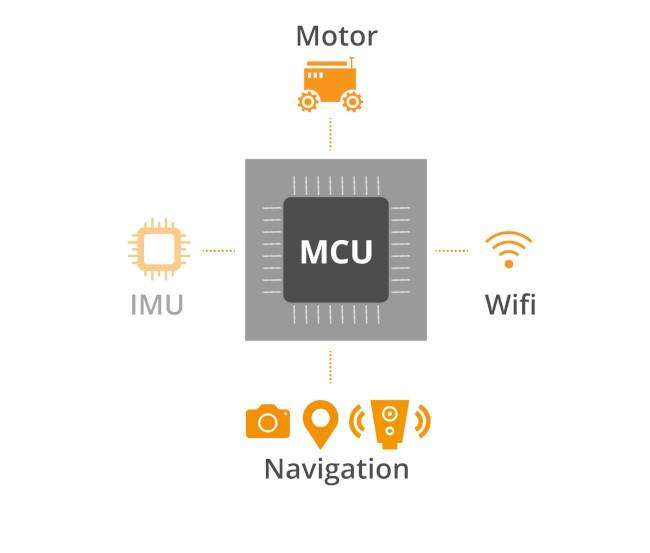
以 Raspberry Pi 或 Arduino 单板计算机为中心构建您的系统,这是开始设计原型的最简单方法之一。对于专业开发,NVDIA 或 STM32 是合适的平台。对于注重精细运动的系统,可以将具有 RTK 厘米级定位功能的 GPS/GNSS 接收机与其他传感器(例如相机或激光雷达)相集成。当机器人在敏感物体周围或在机器人队列中航行时,精确定位尤为重要。Septentrio GNSS 接收机不仅精确,而且在具有挑战性的环境中也能维持稳健运行,而内置 AIM+ 技术提供无与伦比的抗 GNSS/GPS 干扰(经常发生在包含许多彼此靠近的电子设备的系统中)能力。在我们的 社区 页面上,您会找到可帮助您轻松集成 Septentrio 接收机的开源资源,例如 MosaicHAT Raspberri Pi 插件、Mowi 无线等。
传感器融合: GNSS 和其他传感器
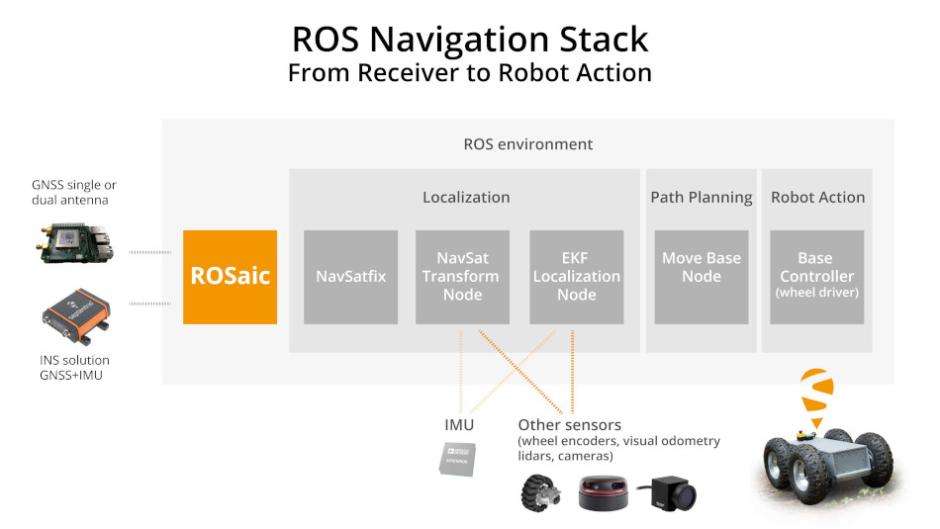
激光雷达、摄像头或雷达等传感器可以集成到 ROS 的导航堆栈中。添加 GNSS 接收机可将系统置于具有分米级甚至厘米级精度的绝对全球坐标上。 GNSS 和惯性测量装置 (IMU) 的结合 - 即传感器融合 - 可以在导航堆栈内或直接在单板 GNSS/INS 系统上进行。Septentrio 的市售 GNSS/INS 接收机能提供卓越的定位和定向性能,并简化了与 ROS 导航堆栈的单一输入集成。

其他加速机器人开发的工具
对于原型设计,mosaicHAT 开源主板可用于轻松地将 mosaic GNSS 模块链接到 Raspberry Pi 甚至 Arduino。这款包含所有基本通信接口(USB、串行端口、事件、PPS、FTDI)的紧凑型 GNSS 主板具有公开可用的基准设计和封装。 Mowi 是 Septentrio 具有 Wi-Fi 和蓝牙通信功能的高精度 GNSS 镶嵌模块的开源基准设计,可以针对自定义应用程序进行编程,为互联机器人技术增加巨大价值。 有关 MosaicHAT、mowi 和其他用于 GNSS 集成的开源项目的更多信息,请参阅我们的社区 页面。
UAV 和无人机也属于机器人,在某些情况下基于 ROS。然而,许多其他航拍系统使用 ArduPilot 或 PX4 自动驾驶仪进行飞行控制。Septentrio 接收机还可以与这些软件套件轻松集成,为安全的无人机导航或测绘提供可靠定位。对于 PX4 自动驾驶仪,Septentrio 镶嵌 GNSS 模块和 AsteRx-m3 主板有一个专用的 驱动程序,可用于单天线或双天线定向配置。
应用案例

割草/机器人
全自动驾驶的牵引车用 Mosaic-X5 实现可靠的定位与导航
认识一下 RenuBot,来自 Renu Robotics 的灵活的电动牵引车机器人,它以可持续方式削减运营成本。

农业/机器人
自动驾驶和除草,当今农场的现实
认识一下来自Sitia的TREKTOR,一台自主式混合动力机器人,它不知疲倦地给有机葡萄园除草,名为“Anjou Gamay Village”的最上乘法国葡萄酒中的一部分就产于此。

UAV/无人机
Mosaic-X5 让 UAV 能够安装紧凑型高性能部件
了解 Hitec 为何选择 Mosaic 作为其专为摄影测量和其他无人机应用设计的最尖端部件的定位解决方案。
了解更多
- GitHub
- ROSaic 存储库 - 用于 Mosaic 和其他接收机的 ROS 驱动程序
- MosaicHAT 存储库 - Raspberry Pi 或 Aduino 硬件的插件
- - 用于 Mowi 的 mosaic 存储库的无线通信硬件
- PX4 存储库– 用于将 Mosaic 或 AsteRx-m3 集成到 PX4 自动驾驶仪中的驱动程序