
ロボット装置と自律装置に対応するGPS/GNSS
ハードウェアアーキテクチャ:最適なコンポーネントを選択
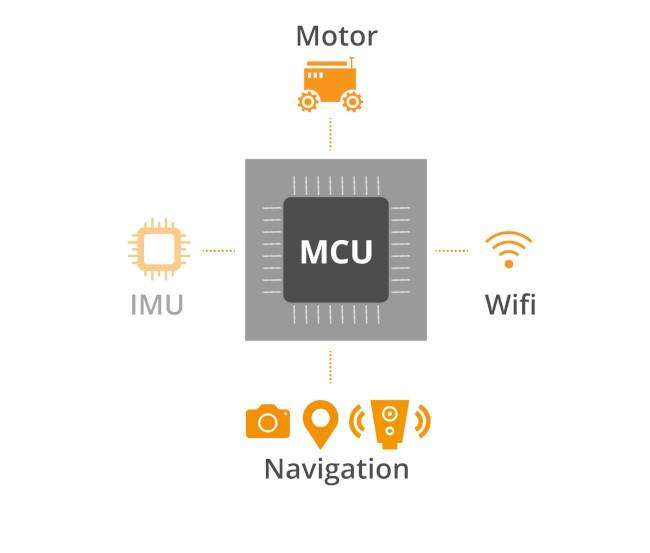
Raspberry PiやArduinoの単一ボードコンピューターを中心にシステムを構築することは、試作品を開始する最も簡単な方法の1つです。プロフェッショナルな開発には、NVDIAまたはSTM32が最適なプラットフォームです。きめ細かい動作が重要なシステムの場合は、カメラやLiDARなど他のセンサーと共に、RTKセンチメートルレベルの測位を行うGPS/GNSS受信機を統合できます。慎重な扱いが必要な対象物の周りまたはロボットフリートでロボットがナビゲートする場合、高精度測位が特に重要です。セプテントリオGNSS受信機は高精度なだけではありません。多数の電子機器が隣接して配置されているシステムで生じがちなGNSS/GPS干渉に比類ない耐性を発揮するAIM+テクノロジーを内蔵しているため、過酷な環境下でも安定して動作します。弊社のコミュニティページでは、mosaicHAT Raspberri Piアドオン、Mowiワイヤレスなど、セプテントリオ受信機の統合を容易にするオープンソースリソースを紹介しています。
センサーフュージョン: GNSSおよび他のセンサー
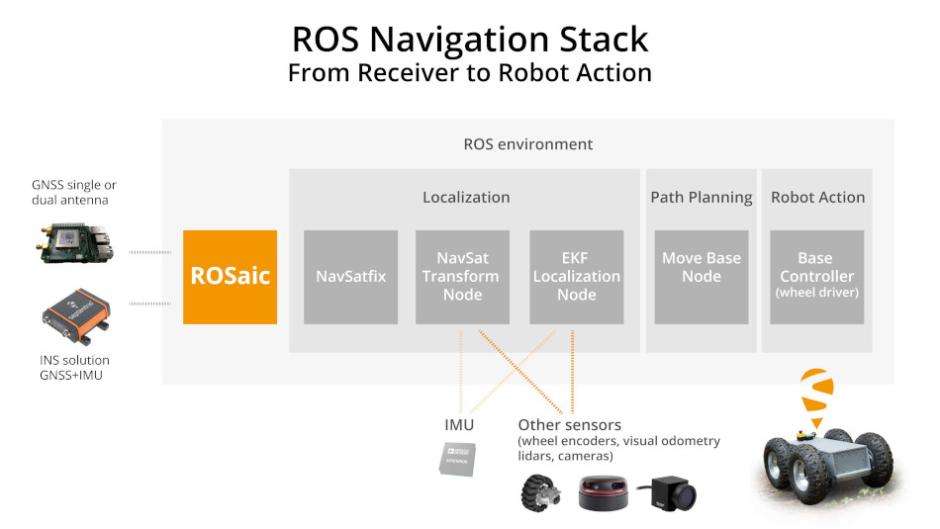
Lidars、カメラ、レーダーなどのセンサーをROSのナビゲーションスタック内に容易に組み込めます。GNSS受信機を追加すると、システムは、デシメートルまたはセンチメートルレベルの精度を備えた絶対グローバル座標に配置されます。GNSSとIMUを組み合わせることもセンサーフュージョンであり、ナビゲーションスタック内またはGNSS/INSシステムの単一ボードに直接行うことができます。セプテントリオの市販のGNSS/INS受信機は卓越した測位と方位性能を実現し、ROSナビゲーションスタックへの単一入力で統合を簡素化します。

シミュレーション: 開発時間を短縮
開発プロセスの早い段階でシミュレーションを実行すれば、設計をあらかじめ微調整し、コードを徹底的にテストし、センサーの故障時など特殊な状況下でロボットの動作を確認することで、ハードウェア/ソフトウェアの反復にかかる時間を短縮できます。ROSaicに記録されたGNSSデータを渡すだけで、ROSナビゲーションスタックコードを徹底的にテストできます。次に、ROS可視化および分析ライブラリー、Gazeboなどのシミュレーションソフトウェアでロボットの動作を検証します。 また、AmazonのAWS RoboMakerは、クラウドでシミュレーションツールのコレクションを提供しています。
ロボット開発を迅速化するその他のツール
試作品には、mosaicHATのオープンソースボードを使って、mosaic GNSSモジュールをRaspberry PiまたはArduinoにも容易にリンクできます。 基本的なすべての通信インターフェース(USB、シリアルポート、イベント、PPS、FTDI)を搭載したこの小型GNSSボードは、広く提供されている基準設計とフットプリントを備えています。Mowiは、Wi-FiおよびBluetooth通信を備えたセプテントリオの高精度GNSS mosaicモジュールのオープンソース基準設計で、カスタムアプリケーション用にプログラミングして、コネクテッドロボットに大きな付加価値をもたらします。GNSS統合に対応するmosaicHAT、mowi、その他のオープンソースプロジェクトの詳細については、コミュニティのページをご覧ください。
UAVやドローンもロボットであり、ROSをベースにしているケースもあります。ただし、他の多くの空中システムは、飛行制御にArduPilotやPX4 Autopilotを使用しています。セプテントリオ受信機もこれらのソフトウェアパッケージと容易に統合して、ドローンの安全なナビゲーションやマッピングを実現する高信頼性の測位を行います。PX4 Autopilotには、セプテントリオmosaic GNSSモジュールとAsteRx-m3ボード専用のドライバーがあり、シングルまたはデュアルアンテナのヘディング構成に対応しています。
詳細はこちら
- オンデマンドの無料ウェビナー
- GitHub
- ROSaicのリポジトリ - mosaicおよび他の受信機のROSドライバー
- MosaicHATのリポジトリ - Raspberry PiまたはAduinoハードウェア用のアドオン
- Mowiのリポジトリ - mosaic用の無線通信ハードウェア
- PX4のリポジトリ – PX4 AutopilotsへのmosaicまたはAsteRx-m3の統合用ドライバー