FUSE+ sensor fusion

What is sensor fusion and how does it help me?
A GNSS/INS system fuses a GNSS receiver with an inertial sensor, improving positioning reliability and availability, while providing orientation (heading, pitch and roll) in addition to high-accuracy positioning. In a sensor fusion system several sensors work together to achieve a higher degree of performance and capability, than is possible on a single sensor. In addition to the GNSS receiver other sensors can be appended to improve positioning availability and reliability. Since various sensors are based on different principles and use different inputs it becomes possible to overcome the weaknesses of each particular sensor.
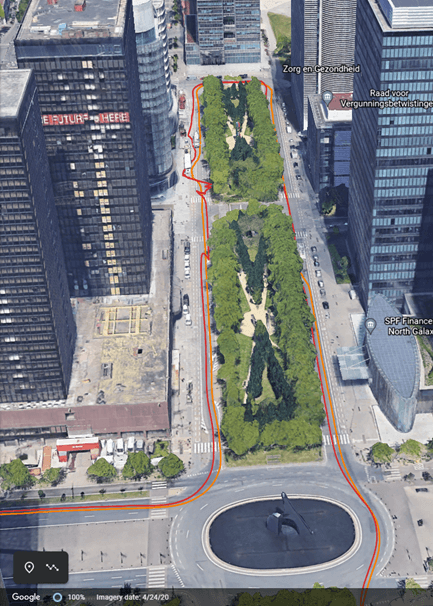
FUSE+ extended availability
GNSS receivers lose tracking when the sky is obstructed and they cannot “see” any GNSS satellites. If a receiver is fused with an IMU (Inertial Measurement Unit), which does not rely on external input, positioning availability can be extended. In challenging environments with extreme multipath, which cannot be fully compensated by APME+, positioning accuracy and availability can be improved with FUSE+.
FUSE+ highest level of integrity
Septentrio RAIM+ technology informs the system about receiver accuracy, by providing truthful uncertainty limits of the position. FUSE+ further enhances RAIM+ thanks to the addition of independent inputs, which can be used to cross-check receiver calculations.

Are all sensor fusion systems created equal?
The benefits of GNSS sensor fusion are clear, but its full capabilities are unlocked with a deep insight of GNSS technology, which is the most complex sensor in this fusion system. Septentrio has been designing top-performance GNSS receivers for over 20 years, which is what enables us to create FUSE+ technology, ensuring that each sensor works in the most efficient manner.

Which sensors are most often combined with GNSS, in an industrial environment?
IMU is the most used sensor in addition to the GNSS receiver. These sensors do not require any additional input and they are not affected by environmental conditions. However, there is an intrinsic vulnerability to shocks and vibrations.
Vehicle velocity is also a commonly used input because this information is often already available to the control system. This enables the receiver to prolong positioning availability in GNSS denied areas and improves integrity with an additional independent input. FUSE+ does not rely on the raw input from odometry but leaves the user flexibility of obtaining vehicle velocity with any type of sensor (i.e. LiDAR, camera, etc.). The vehicle velocity feature is optional in FUSE+.