Integrity: Can you really trust your GPS position?

Such error reporting is important for all autonomous machines, but especially for assured PNT applications and mission critical operations. Keep in mind that a consistent position may look accurate but could still be incorrect. The positioning uncertainty gives an indication to which extent you can rely on the positioning accuracy at any given moment.
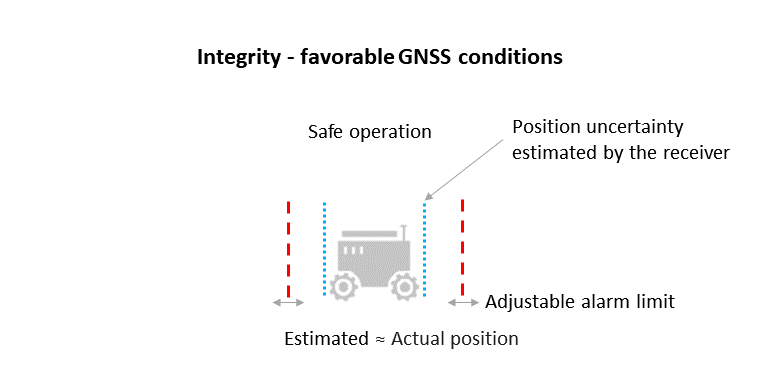
The blue line on the diagram below shows position uncertainty estimated by a GNSS receiver under favorable conditions, when the view of the sky is unobstructed, and the receiver has a direct line-of-sight to many satellites. The receiver operator can set an alarm limit (shown in red), so that the receiver can flag situations when positioning uncertainty becomes too large.
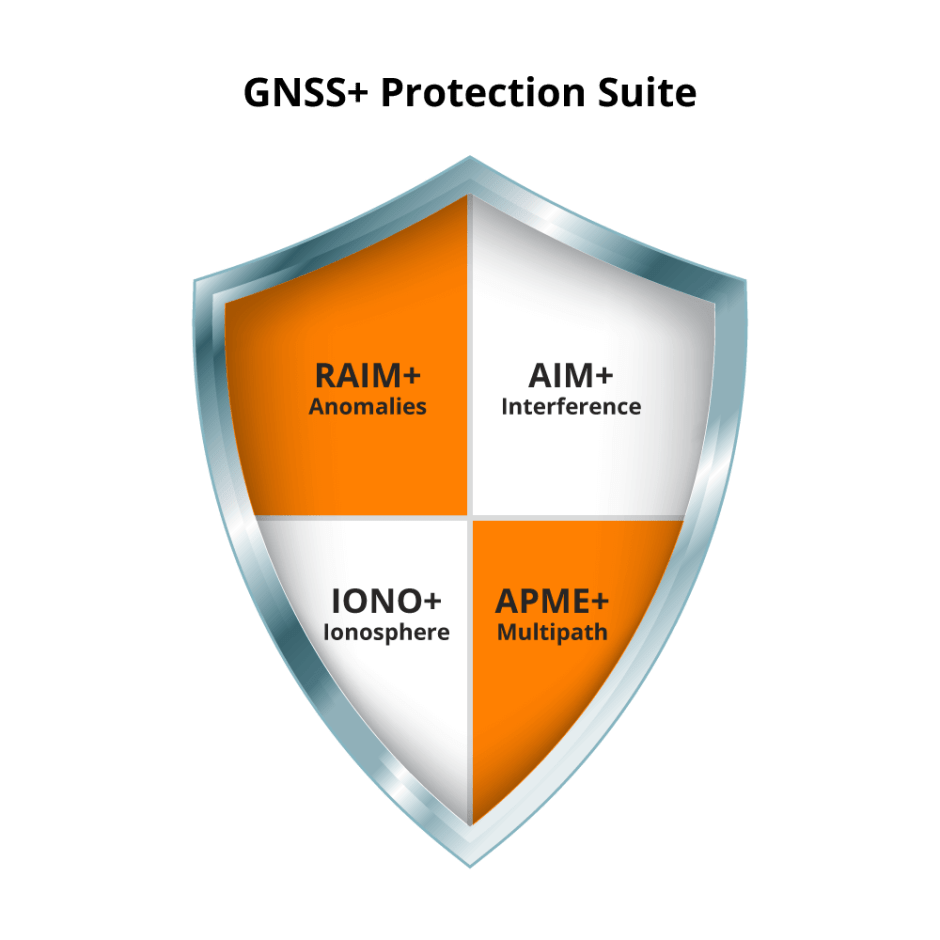
The underlying mechanism behind truthful positioning uncertainty reporting is RAIM (Receiver Autonomous Integrity Monitoring), which ensures truthful positioning calculation based on statistical analysis and exclusion of any outlier satellites or signals. Septentrio receivers are designed for high integrity and take RAIM to the next level with RAIM+, guaranteeing truthfulness of positioning with a high degree of confidence. In Septentrio receivers RAIM+ is actually a component of a comprehensive receiver protection suite called GNSS+ comprising positioning protection on various levels including AIM+ anti-jamming and anti-spoofing, IONO+ resilience to ionospheric scintillations and APME+ multipath mitigation.
The Septentrio RAIM+ statistical model has been fine-tuned with over 50 terrabytes of field data collected over 20 years. It removes satellites and signals which may give errors due to multipath reflection, solar ionospheric activity, jamming and spoofing, while working together with the GNSS+ components mentioned above. Because of this multi-component protection architecture, it achieves a very high level of positioning accuracy and reliability which goes well beyond the standard RAIM. The RAIM+ statistical model is adaptive, highly detailed and complete, taking advantage of all available GNSS constellations and signals. The full RAIM+ functionality is even available in Septentrio’s GNSS/INS receiver line. User controlled parameters allow it to be tuned to specific requirements.
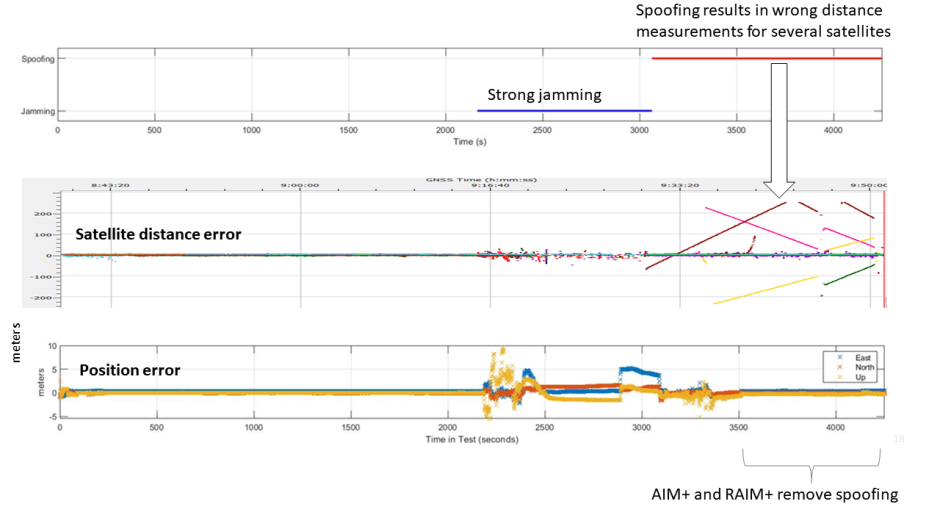
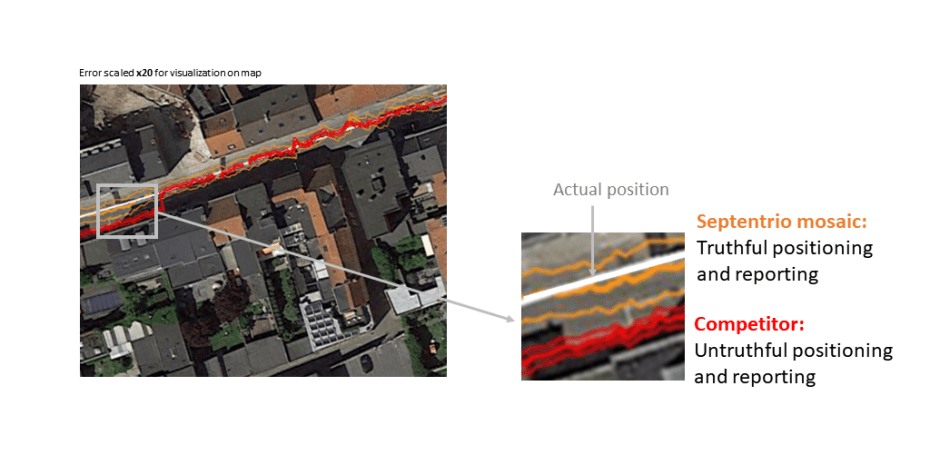
This example shows that even in the case of jamming and spoofing, Septentrio’s high integrity receiver technology delivers truthful and reliable positioning that any autonomous system can count on.
GNSS design around reliability
GNSS receivers designed to be reliable strive for high integrity in both reporting of the positioning uncertainty as well as in RAIM+ advanced statistical modelling. This ensures that these receivers provide truthful and timely warning messages and are resilient in various challenging environments. Other technologies such as INS (Inertial Navigation System) can also be coupled to the GNSS receiver to extend positioning availability even during short GNSS outages. Quality indicators for satellite signals, CPU status, base-station quality and overall quality allow monitoring of positioning reliability at any given time. High-integrity GNSS receivers provide truthful positioning in autonomous machines such as the Sitia weeding tractor. They are also crucial components in safety-critical applications, assured PNT and any other application where accuracy and reliability matters.