Top 3 Positioning Challenges in Autonomous Marine Navigation

GPS (GNSS) positioning plays a key role in the navigation of autonomous vessels by providing positioning information such that the ship can navigate safely around the port, stay on a predetermined route and dock at the destination harbor. Inland navigation, where distance between ships can be down to 1m in a tight space of a lock, demands positioning solutions with the highest positioning accuracy and reliability.
Why Inland Marine Automation?
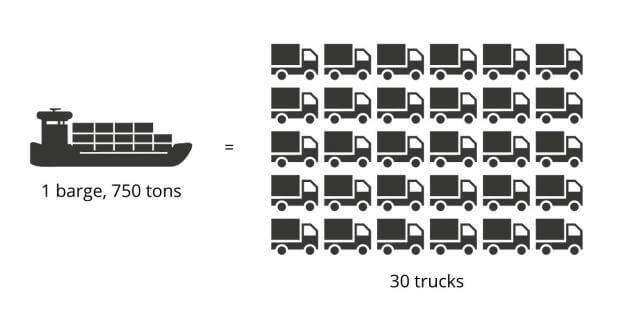
Currently only 6% of inland transport travels on waterways, while water transport is actually more energy efficient and safer relative to its rail and road counterparts. Optimised route and fuel efficiency, increased cargo space and savings on human resources are just some of the ways automation helps inland barge owners increase their margins and gain a competitive edge in the transport market.
Image
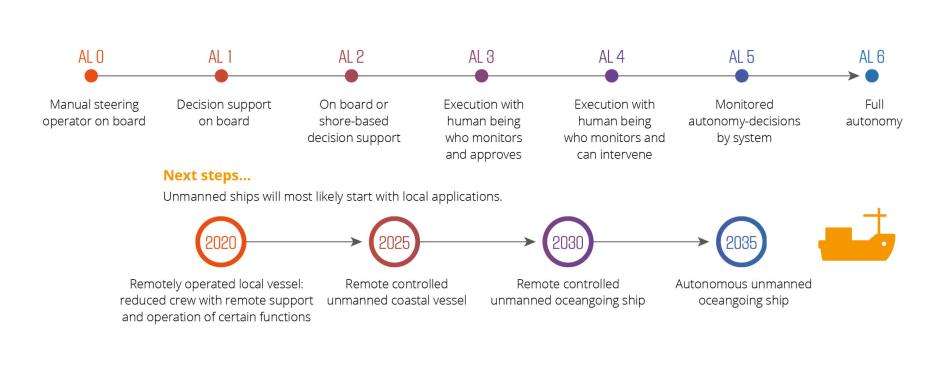
Autonomous barges are monitored by a captain based in a Remote Operating Center who monitors the navigation of several unmanned ships simultaneously, and if needed can intervene to take over navigation control.
Unlike open sea transport, inland barges need to navigate narrow waterways which pass through locks, under bridges and near urban areas all of which raise a number of engineering challenges for an accurate and continuous positioning solution.
Top 3 Positioning Challenges in Inland Marine Automation
1: Sub-meter accuracy in the presence of extreme multipath
Narrow inland waterways, lock systems and harbors require boats to navigate with utmost precision, sometimes leaving only a few meters between passing boats. Docking and undocking manoeuvres require special attention from the remote captain who monitors the process. In order to judge the situation correctly and if needed to remotely steer the ship, the remote captain needs to know the exact position of the ship down to sub-meter level.
Multipath errors are caused by GPS satellite signals being reflected off nearby structures such as lock walls, bridges, buildings and other ships. Multipath delays the GPS signals and reduces both the accuracy and reliability of the ship’s position. Another factor which affects positioning and its accuracy is GPS satellite visibility. When the ship is lowered into a lock, the lock walls block the line-of-sight from the ship to GPS satellites which results in a loss of information for positioning calculation.
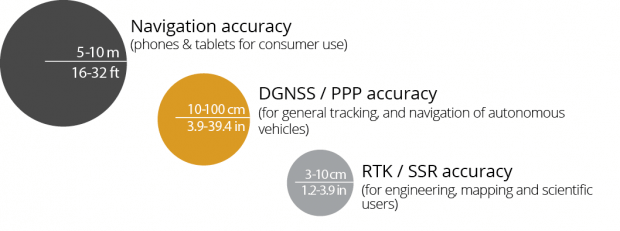
Solution: RTK GNSS centimetre level positioning can be achieved by receiving signal corrections – commonly known as RTK corrections – from a local base station or via a cellular link. Other corrections such as SBAS or PPP provide sub-meter positioning and use corrections from geostationary satellites.
Built-in multipath mitigation algorithms such as Septentrio’s APME+ can detect and minimise the effects of multipath errors. Tracking multiple signal frequencies and multiple GNSS satellite constellations ensures redundancy such that the GNSS receiver always has enough measurements to provide an accurate position: GPS, GLONASS, Galileo, BeiDou are the four main positioning system constellations.
Image
2: Interference: jamming and spoofing
Interference poses a much greater challenge on small waterways than in the open sea. Jamming is a distortion of the low-powered GPS signals due to interference such as radio waves, cellular communication links or chirp jammers, which are jamming devices used by drivers to avoid road tolling. Unintentional jamming can also be caused by various devices on board the vessel itself such as radars, radios, antennas and satellite modems. Interference caused by jamming reduces position accuracy and can even cause a loss of GPS positioning in the radius of hundreds of meters around the interference source.
While jamming causes random noise on the GPS frequency band, spoofing replaces the positional information sent by the satellites with incorrect positional information. A spoofing device can potentially be used to disturb the trajectory of the ship and make it vulnerable to theft or even hijacking.
Solution: Interference mitigation algorithms such as Septentrio’s Advanced Interference Mitigation (AIM+) ensures reliable positioning in the face of jamming or spoofing. They identify the interference frequency and block it out of their positional calculation. A graphical spectrum analyser helps evaluate interference frequency and identify the interference source.
3: Reliable heading information needed for vessel control
Vessel heading is the orientation of the ship in the water, which can differ from the velocity vector due to water currents and wind. Only with exact heading information can the remote captain visualise the full length of the ships within the mapping software. Traditional magnetic compass solutions are sensitive to large metal objects in the area and can be affected by locks, bridges as well as other ships passing nearby. More advanced gyrocompass-based solutions are also available and typically more reliable, however are price prohibitive and too costly a component for small barge automation projects.
Solution: Two antennas are placed a few meters apart on board the ship. A dual frequency GNSS receiver uses accurate antenna positioning information to determine the heading angle down to 0.01°.
|
|
User Story:SEAFAR is a Belgian company which pioneers cargo-barge automation technology and offers unmanned barge monitoring services. SEAFAR has an integrated Septentrio’s dual antenna, multi-frequency, multi-constellation receiver into their autonomous vessel technology to provide sub-meter positioning for vessel monitoring and control. This receiver's robust enclosure is ideal for the harsh outdoor marine environment. The dual antenna set-up provides precise heading information on top of reliable positioning. Image
|