Look, no Ground Control Points!

Your challenge, should you choose to accept it …
You’ve been asked to survey some points on the ground with centimetre-level accuracy. Feeling confident? How about a few hundred points spread over 7.5 hectares (18.53 acres) and the job has to be done in one afternoon. Throw in the fact that the area you have to survey is in a quarry which has been closed off due to a recent landslide. Still feeling confident? You should and here’s why.
Improvements in Unmanned Aerial Vehicle (UAV) technology combined with more compact high-end Global Navigation Satellite Systems (GNSS) receivers means that you no longer have to compromise on precision to measure in those hard-to-reach areas.
Before the flight
UAVs have become more reliable and easier to work with: from programming flight paths to installing additional equipment on board, UAV applications are no longer confined to a limited group of specialists.
For a survey flight, your UAV will need to have installed: a high-resolution camera and a high-end GNSS receiver module. To fly the UAV through a pre-programmed flight plan, an autopilot flight controller is often included.
Image
drone with camera along with the installed Septentrio AsteRx-m UAS GNSS receiver.
The flight
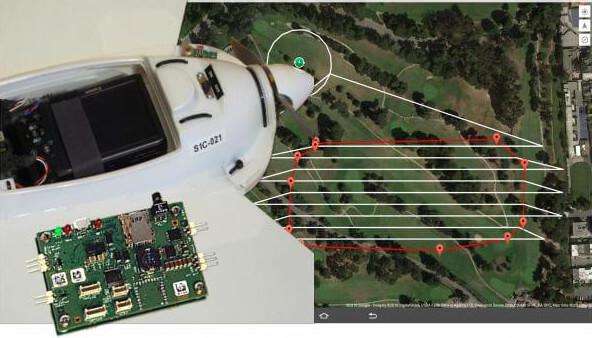
The flight path shown below covered 7.5 hectares (18.53 acres) and was flown in 15 minutes. The 143 photographs taken during the flight were geotagged with GNSS standalone mode positions. Accuracies in standalone mode are typically around 1 to 4 metres (3.28 to 13.13 ft).
If the on-board receiver receives correction information in real time from a nearby GNSS base station, it calculates positions using the more precise (centimetre-level) RTK mode.
With the necessary data from a GNSS base station, RTK positioning can also be calculated ‘offline’ in the processing step. Offline reprocessing using removes the need for a real-time data connection between the UAV and base station which simplifies the hardware setup on the UAV and reduces the payload.
Image

Positioning was provided by an AsteRx-m UAS receiver.
Offline RTK
The AsteRx receiver recorded the times the photographs were taken by time-stamping a pulse signal from the camera shutter. It also recorded dual-frequency GNSS measurements during the flight.
Geotagging software uses the GNSS data recorded by the receiver and, combining it with the base station reference file, is able to calculate centimetre-level RTK positions for georeferencing the photographs. The EXIF data of the photographs is then replaced with the more accurate RTK georeferences ready for image processing.
With the photographs now stamped with a precise time and location, they can be processed. The blue crosses in the screenshot below are the ground locations of check points used to determine the final precision and accuracy. They play no part in the processing.
This example details the use of Pix4D and PhotoScan however, other similar image processing tools could equally well have been used.
Image

What accuracy can you expect on the ground?
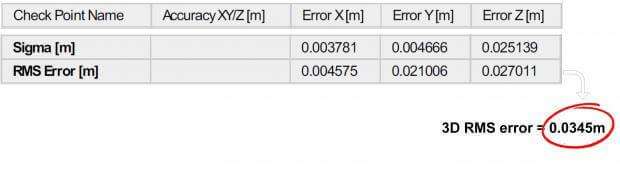
The photographs in this example were processed using two popular image processing software tools Pix4D and PhotoScan from Agisoft. The values highlighted below are the 3D-RMS values from their respective reports. These values are calculated from the sum of squared differences between each of the 20 check points’ surveyed positions and their positions as calculated using the image processing software.
The 3D accuracies for both software tools are better than 3.5 cm, with the height (Z) being the largest contributor to the total error. This is the same accuracy that a human surveyor would typically reach when surveying each of the 20 points check points manually.
Pix4D
Image
Agisoft PhotoScan
Image

The combination of high-resolution aerial photographs with geotagging software, for georeferencing with RTK positions from a compact high-end receiver module, provides the complete input for centimetre-level mapping precision on the ground. The same precision as manual survey can thus be achieved in a fraction of the time for all ground points within the surveyed area.
Download this insight in pdf