
マルチパス回避技術
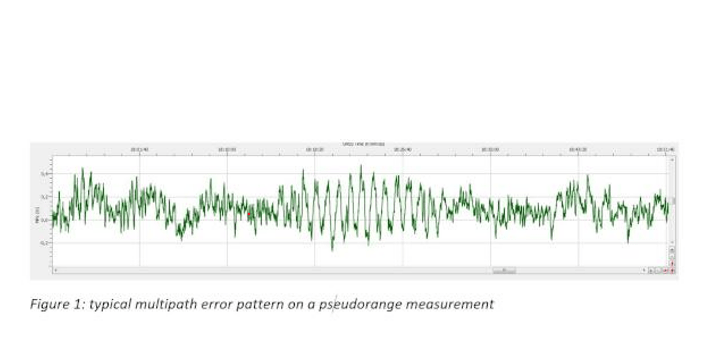
セプテントリオのRxControlアプリケーションでMPx Time Plotを開くと、マルチパスによる個々の擬似距離の誤差をリアルタイムでモニタリングできます。 以下のRxControlのスクリーンショットに示すように、マルチパス誤差は、メートル単位の振幅で振動パターンを示す傾向があります。
APME+: 原理
APME+は、各追跡チャネルに追加の相関器を使用して、擬似距離とキャリア位相の測定値におけるマルチパス誤差を推定します。 測定値は、推定誤差を差し引いて修正されます。 他のほとんどのマルチパス回避技術では、追跡チャネルの相関器の変更が伴いますが、APME+の場合、追跡チャネルの変更はありません。 マルチパス誤差は、信号の追跡とは関係なく推定されます。
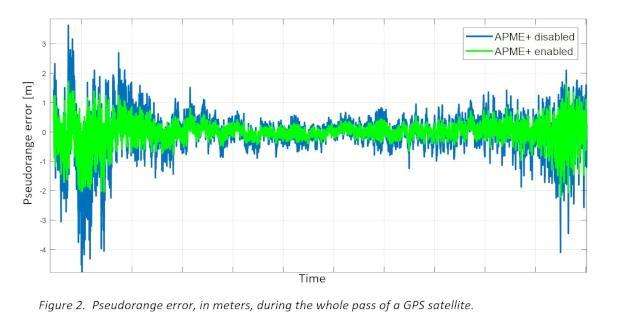
次の図は、APME+を無効にしたとき (青色) と有効にしたとき (緑色) の疑似距離の誤差の違いを示しています。APME+は、誤差を半分以下まで低減します。
APME+: ショート・マルチパス向けに得に有効
近くの表面(屋根、地面、建物など)からの反射が最も一般的で、最も危険でもあります。 近くの表面(20 m未満の距離)で反射された信号は、直進信号に比べて短い遅延でアンテナに到達します。 そのため、直進信号との区別が難しく、多くの回避アルゴリズムはうまく機能していません。
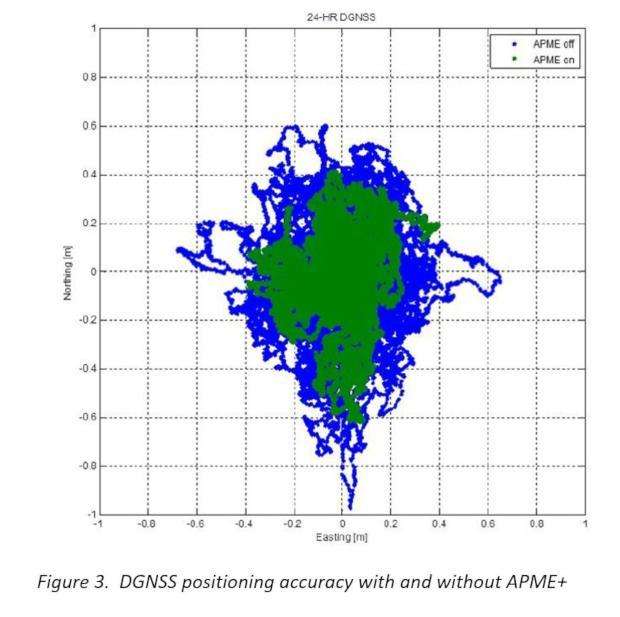
図3は、DGNSSモードでの位置精度に対するAPME+の効果を示しています。
APME+は、セプテントリオ受信機でデフォルトで有効になっています。
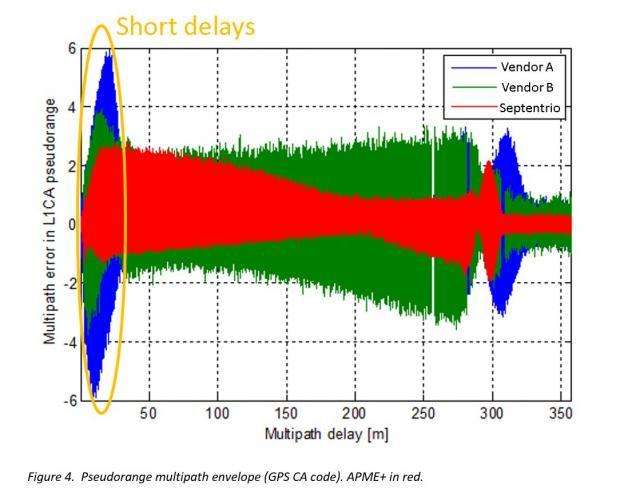
一方でAPME+は短時間遅延のマルチパスに対処するように特別設計されています。 それを図4で説明し、GPS L1 CA信号のマルチパスエンベロープを示します。 マルチパスエンベロープは、信号が反射して特定の遅延が伴うために生じる誤差を示します。 ご覧のように、APME+では、短時間遅延で最小のエンベロープになっています。
APME+: バイアスフリー!
他のマルチパス回避技術の一般的な問題は、測定値にバイアスが生じることです。 これは、追跡チャネル内の相関器を変更する必要があり、その結果、受信機がGNSS信号にロックするポイントが変更されることが原因です。 この変更によって、衛星によるバイアスが生じることが知られています。 多くの場合、このバイアスは許容できるものではありません。



.