GPS/GNSS + INS接收机
您在寻找什么?




相关内容
- 客户报道:用于高质量3D测绘和道路检查的激光雷达和GNSS/INS传感器融合
- 客户报道:自动驾驶,当今农场的现实
- 见解文章:我是否应该构建自己的惯性解决方案?
- 见解文章:革新精准农业:配备高性能GPS+INS的无人机
- 见解文章: GNSS定位在安全辅助驾驶中的作用
- 网络讲座:用GNSS/INS构建新世界
- 网络讲座:为农业机器人提供精确的GNSS/INS定位
- 宣传册:我们的惯性接收机系列
可靠的GNSS/GPS定位和姿态。
GNSS + INS(惯性导航系统)提供厘米级可靠位置以及姿态信息(航向角、横滚角和俯仰角)。此系统精心设计用于在挑战环境下保持稳定运行,即使在GNSS短暂中断时也能提供连续定位。为了实现惯导功能,GNSS接收机与业界领先的IMU(惯性测量单元)集成使用。
产品系列:
GPS+INS应用场景
什么是惯性导航系统 (INS)?惯性导航系统是一种测量旋转和加速度的设备,并利用这些信息来计算其相对于起点的相对位置。与此相反,GNSS系统计算的是任意点的绝对位置。把这两种技术结合起来,就形成了一个强大的定位产品,可以实现精确的全球定位和定向。GNSS/INS经常用于建筑、物流和精密农业等行业的机器控制和自动化中,尤其是在GNSS卫星视线受到限制或阻碍的挑战环境中。
图像

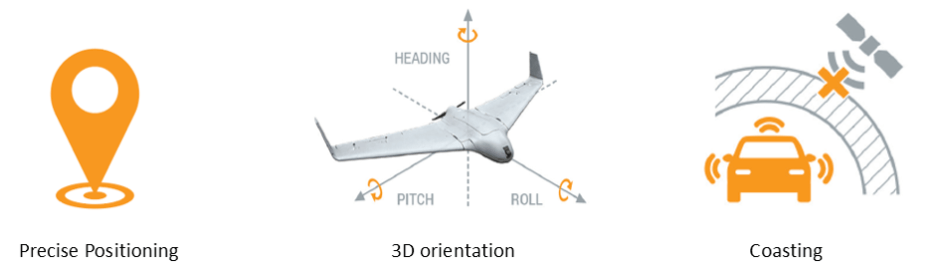
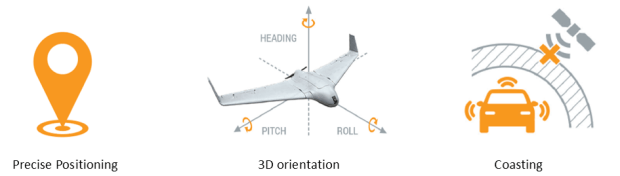
专业的GNSS接收机利用多星座、多频点GNSS技术提供可靠的精确定位。接收机至少需要收到4颗卫星信号才能计算出自己的位置,而需要更多卫星才能实现厘米级定位 (RTK)。当天空暂时被遮挡,接收机失去GNSS卫星信号跟踪时,其他传感器就会接管,如IMU(惯性测量单元),根据最后的已知位置和IMU的数据计算相对位置。这称为“巡航”或“航位推算”。除了提高定位的可用性之外,IMU还提供物体的3D姿态(航向角/偏航角或俯仰角/横滚角)。
图像
GNSS与IMU的集成使得测的精度和鲁棒性显著提高。高精度的速度在列车控制、汽车测试或体育等运动应用中特别有用。与单GNSS一种技术相比,GNSS/INS系统的定位精度也因为定位解算“平滑”处理而略胜一筹。总之,GNSS+INS是强大的导航和测量工具,如今已广泛应用于无人驾驶汽车、机器人、机械自动化、汽车测试甚至专业体育等应用中。
GNSS/INS系统中的IMU惯性传感器
INS系统的核心是IMU设备,利用陀螺仪和加速计测量旋转与加速度。IMU有许多类型,它们的性能各不相同。有用于粗略运动感知的消费级IMU、温度补偿的工业级MEMS IMU以及昂贵的基于光纤的高精度IMU。在GNSS接收机内部,卡尔曼滤波算法将IMU和GNSS数据相结合,提供精确可靠的GNSS/INS定位与3D定向。
图像