CLAS - GNSS corrections for Japan
Centimetre-level Augmentation Services (CLAS)
- PPP-RTK positioning service also referred to as SSR correction services
- For Japan only
- Available on GNSS module and evaluation kit, OEM board and ruggedized box
- Cm-level RTK positioning even in the most remote areas
The CLAS service of QZSS in a nutshell
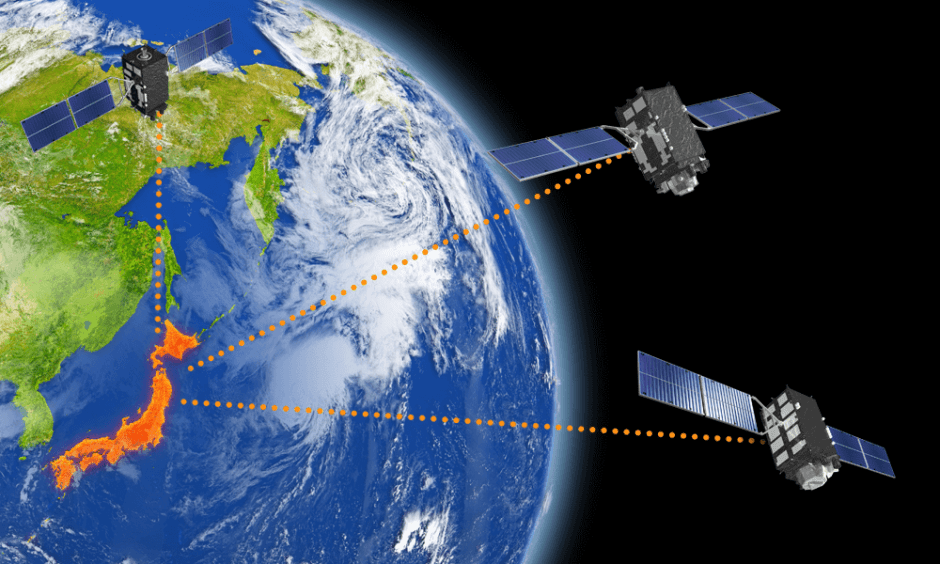
CLAS stands for Centimeter-Level Augmentation Service. It is a stream of correction data that allows RTK-level positioning. The service covers the whole landmass of Japan as well as its nearby shore area (see Figure 1).
The service is unique in the sense that it is broadcast by the QZSS (Michibiki) satellites themselves, which means that the rover does not need terrestrial communication to a base station or NTRIP service. This allows for RTK-level positioning even in remote area’s where there is no cellular coverage.

Figure 1: Coverage area of CLAS service
The key enabling technology is SSR, which stands for Space State Representation. It is a detailed model consisting of satellite orbit and clock errors as well as the delays caused by ionosphere and troposphere. To allow for fast convergence all over Japan, the ionosphere/troposphere model is based on the data from about 300 CORS stations distributed evenly over Japan.
The service is broadcast on all QZSS satellites on the D-channel of the L6 band (1278.75 MHz). To cope with the limited bandwidth (2000 bps), various compression techniques are used. A compression factor of about 1/1000 compared to RTCM is achieved. The resulting format is called Compact SSR (or cSSR).
The performance standard of the service is shown in Figure 2. Additionally, the time-to-first-fix is specified as faster than 1 minute (95%).

Figure 2: Performance standard of CLAS
More information can be found on QZSS (Quasi-Zenith Satellite System) - Cabinet Office (Japan).
Septentrio support for CLAS
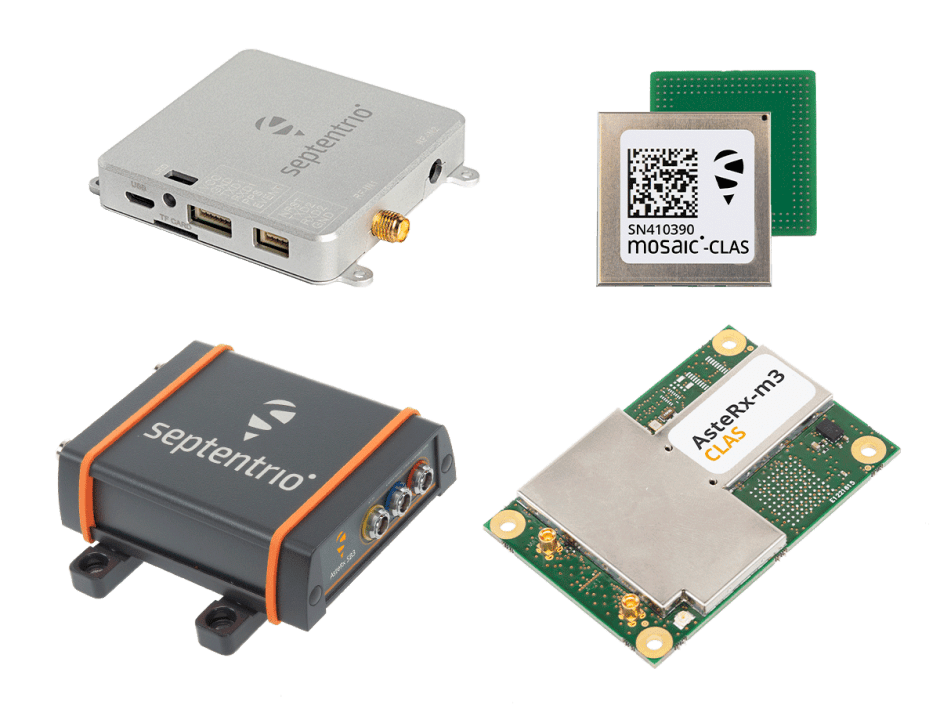
Septentrio supports CLAS on three dedicated products: mosaic-CLAS (GNSS evaluation kit and module), AsteRx-m3 CLAS (OEM board) and AsteRx SB3 CLAS (boxed receiver). The AsteRx-m3 CLAS and AsteRx SB3 CLAS are dual-antenna receivers that provide heading on top of CLAS positioning.
Image
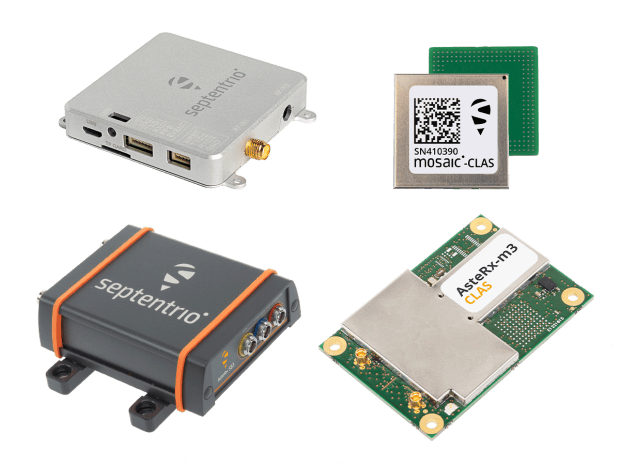
Figure 3: On top from left to right, mosaic-go CLAS evaluation kit, mosaic-CLAS GNSS module. In bottom from left to right: AsteRx SB3 CLAS ruggedized GNSS receiver, and AsteRx-m3 GNSS OEM board receiver
The receivers will use CLAS in their default configuration, but it is possible to change a few settings. The CLAS related menu is shown in Figure 4.

Figure 4: CLAS settings menu in Septentrio WebUI
The L6 Signal Selection allows to select the satellite from which the L6 signal is used. All QZSS satellites broadcast the same information and it is advised to use the Auto setting, which will always select the QZSS satellite with the highest elevation.
The L6E is for future support of MADOCA, a PPP-like service.
The Crustal Deformation Correction is by default Off, which means that the coordinates reported by the receiver are using the WGS84 Geodetic Datum. Turning it to on, the coordinates will be reported in the JGD2011 datum, which is the standard in Japan. The transformation between both datums is done using a parameter file, which needs to be updated yearly.
Performance data of CLAS taken with Septentrio receivers
Figure 5 shows an XY-plot of 24h/1sec data of a static test in open-sky. Most points lie within +/- 2 cm from the average. This is well within the performance standards specified by CLAS (<6 cm, 95%).
Figure 6 shows a comparison of the fix rate between CLAS and all-constellation RTK over a 100km drive from rural-area Chiba (bottom right) to urbanized Yokohama (top left). The long interruption is due to an undersea tunnel. The fix rate of CLAS is 86.5% versus 93.2% for RTK. Most of this difference can be attributed to the longer time CLAS needs to reattain fixed status after coming out of a GNSS-denied area. CLAS is therefore very most suited for applications where the GNSS signals are not frequently interrupted such as drones, agriculture and marine construction.

Figure 5: mosaic-CLAS 24 hours 1-sec static CLAS data (Antenna : PolaNT-x MF, Location : Yokohama)


Figure 6 : Comparison of CLAS (bottom) and all-constellation RTK (top) using the AsteRx-m3 CLAS.

Figure 7 : Initialization time of CLAS