Jam proofing drones

Self-interference affects drones with many electronic devices located close to the GPS
Collect 1 million data points from a 15-minute flight compared to 300 points in a day from a traditional ground survey. It’s no wonder that drones equipped with GPS technology and remote sensors are revolutionising data collection. But will jamming spoil all the fun?
Who let the drones out?
Recent years have seen the appearance of affordable, high-end drones which, coupled with easy-to-use mission-planning tools, has created the perfect environment in which drones can flourish. No longer the preserve of specialist drone users, applications using drones have been venturing into areas such as survey, inspection and volume analysis with an impact that is little short of revolutionary.
Interference can spoil it all
In the air, the stakes are higher. When things go wrong, the consequences are invariably much more serious than they would have been on the ground. One of the biggest threats to drone safety is GNSS interference. At the very least, disruptions to satellite signals can degrade position quality causing fall-backs from high-precision RTK and PPP modes to less-precise modes. In the most extreme cases, interference can result in complete loss of signal tracking and positioning.
Self interference
A significant source of interference on UAVs is often the other components installed on the UAV. The restricted space means that the GNSS antenna is often in close proximity to other electrical and electronic systems.
Image
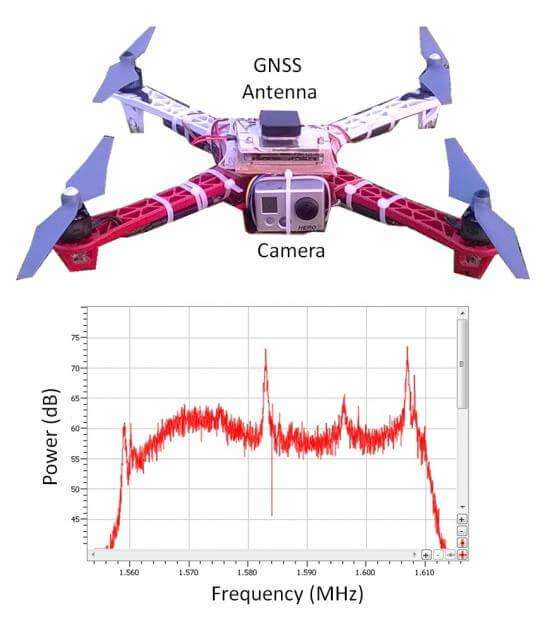
Figure 1 shows what happened to the GPS L1-band spectrum when a GoPro camera was installed on a quadcopter close to the GNSS antenna without sufficient shielding. The three peaks are exactly 24 MHz apart pointing to their being harmonics of a 24 MHz signal: the typical frequency for a MMC/SD logging interface.
An AsteRx receiver was used in this setup which includes the Advanced Infererence Mitigation and Monitoring AIM+ system. As well as mitigating the effects of interference, AIM+ includes a spectrum plot to view the RF input from the antenna in both time and frequency domains. At the installation stage, being able to view the RF spectrum is an invaluable tool for both identifying the source of interference and determining the effectiveness of measures such as modifying the setup or adding shielding. For the quadcopter installation in this example, the loss of RTK was readily diagnosed and solved by placing the camera in a shielded case while the quadcopter was still in the workshop.
External sources of interference
GNSS receivers on-board UAVs can be particularly vulnerable to external sources of interference, be they intentional or not. In the sky, the signals from jammers can propagate over far longer distances than they would be able to on land.
In the case of UAV inspections of wind turbines for example, many countries encourage windmills to be built next to roads, a situation that increases the chance of interference from in-car chirp jammers. These devices though illegal are cheap and can be readily acquired on the internet. Using a chirp jammer, a truck driver can, for example, drive around undetected by the GPS trackers on the truck and car thieves can disable GPS anti-theft devices on stolen vehicles.
External interference: the effect of a chirp jammer on a UAV flight
Although transmitting with a power of around only 10 mW, chirp jammers are powerful enough to knock out GNSS signals in a radius of several hundred metres on land. In the air, the UAV is much more vulnerable as the jamming signals have a far greater reach, unhindered as they are by trees, buildings or other obstacles.
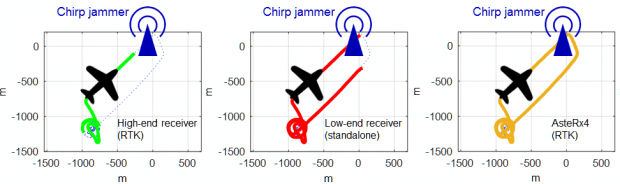
Figure 2 shows how a 10mW chirp jammer can knock out RTK positioning over more than 1 km in a high-end receiver. Even a low-end consumer-grade L1 receiver, being less accurate and thus less sensitive, loses standalone positioning over several hundred metres.
With AIM+ activated, the AsteRx is able to maintain an RTK fix throughout the simulated flight as well as showing no degradation to its position variance. The full details on these simulations can be found in a this white paper.
Solving interference on UAV systems
A comprehensive approach puts interference considerations at the forefront of receiver design and incorporates it into every stage of signal processing. In the case of the AsteRx GNSS receiver, the antenna signal is immediately digitized after analogue filtering and automatically cleansed of interference using multiple adaptive filtering stages.
As each interfering signal has its own individual footprint, being able to visualize the RF signal in both time and frequency domains allows drone users to identify sources of self-jamming and adapt their designs accordingly before the drone gets in the air.
When it is in the air, AIM+ is able to mitigate jamming from external sources: a set of configurable notch filters are complemented by an adaptive wideband filter capable of rejecting more complex types of interference such as that from chirp jammers, frequency-hopping signals from DME/TACAN devices as well as high-powered Inmarsat transmitters.
Image
Download this Insight in PDF format here.
Explore further:
- Webinar: GNSS hacking, from satellite signals to hardware/software cybersecurity
- Brochure: Everything you need to know about radiofrequency interference (RFI) on GNSS/GPS signals